Motor representations concern not only bodily configurations and movements but also more distal outcomes such as the grasping of a mug or the pressing of a switch \citep{butterfill:2012_intention,hamilton:2008_action,cattaneo:2009_representation}.
Some motor processes are planning-like in that they involve deriving means by which the outcomes could be brought about and in that they involve coordinating subplans \citep{jeannerod_motor_2006,zhang:2007_planning}.
Motor processes concerning actions others will perform occur in observing others act \citep{Gangitano:2001ft}---and even in observing several others act jointly \citep{manera:2013_time}---and enables us to anticipate their actions \citep{ambrosini:2011_grasping,aglioti_action_2008}.
In joint action, motor processes concerning actions another will perform can occur \citep{kourtis:2012_predictive, meyer:2011_joint},
and can inform planning for one's own actions \citep{vesper:2012_jumping,novembre:2013_motor,loehr:2011_temporal}.
In some joint actions, the agents have a single representation of the whole action (not only separate representations of each agent's part) \citep{tsai:2011_groop_effect,loehr:2013_monitoring,Menoret:2013fk},
and may each make a plan for both their actions \citep{meyer:2013_higher-order,kourtis:2014_attention}.
An interagential structure of motor representation: \begin{enumerate} \item there is an outcome to which a joint action could be collectively directed and in each agent there is a motor representation of this outcome; \item these motor representations trigger planning-like processes in each agent which result in plan-like hierarchies of motor representations; \item the plan-like hierarchy in each agent involves motor representations concerning another's actions as well as her own; \item the plan-like hierarchies of motor representations in the agents nonaccidentally match. \end{enumerate}
\section{Motor Representation}
A \emph{goal} is an outcome to which an action is directed.
Motor representations represent goals such as the grasping of an egg or the pressing of a switch.
These are outcomes which might, on different occasions, involve very different bodily configurations
and joint displacements (see \citealp{rizzolatti_functional_2010} for a selective review).
Motor representations trigger processes which are planning-like insofar as they involve (a) computing
means from representations of ends; and (b) satisfying relational constraints on actions.
Recall how Ayesha takes a glass and holds it up while Beatrice pours prosecco;
and unfortunately the prosecco misses the glass, soaking Zachs’s trousers.
Ayesha might say, truthfully, ‘The collective goal of our actions was not to soak Zach's trousers in
sparkling wine but only to fill this glass.’
What could make Ayesha’s statement true?
motor representation
Let me mention some almost uncontroversial facts about motor representations and
their action-coordinating role.
\section{Kourtis et al (2014)}
Garbarini et al, 2014 figure 3 (part)
To test this conjecture, Corrado Sinigaglia and I teamed up with
Francesco della Gatta, Francesca Garbarini and Marco Rabuffetti.
We adapted a bimanual paradigm, the circle-line drawing paradigm, which has been
extensively employed for investigating bimanual interference (Franz et al, 1991).
When people have to simultaneously perform noncongruent movements,
such as drawing lines with one hand while drawing circles with the
other hand, each movement interferes with the other and line trajectories
tend to become ovalized. This “ovalization” has been described as a \textbf{bimanual coupling effect},
suggesting that motor representations for drawing circles can affect motor representations
for drawing lines (Garbarini et al. 2012; 2013a; 2015a; 2015b; Garbarini and Pia 2013;
Piedimonte et al. 2014).
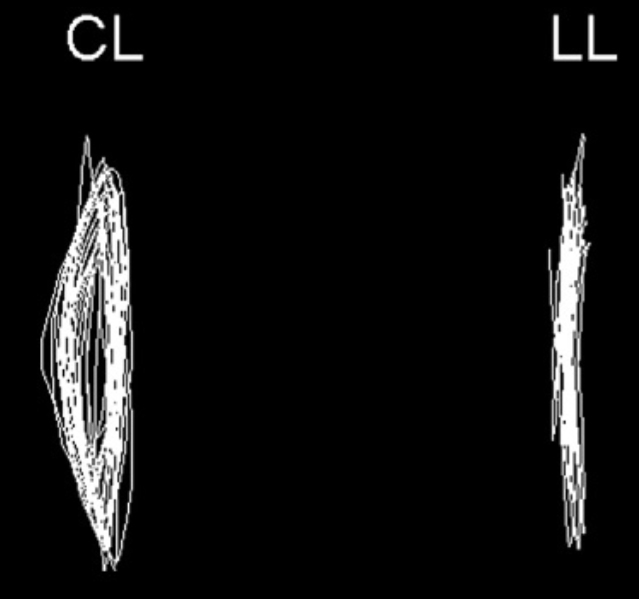
[repetitive] Suppose a straight line and a circle are being drawn at the same time.
The straight line will exhibit ovalization.
This ovalization is not just a consequence of pysiology, for you find much the
same ovalization when someone is merely imagining drawing the circle, and in patients
with anosognosia for hemiplegia.
Instead, the ovalization is a sign that the goal of drawing the two lines, one straight
and the other circular, is being represented motorically.
della Gatta et al, ‘Drawn Together’ Cognition 2017
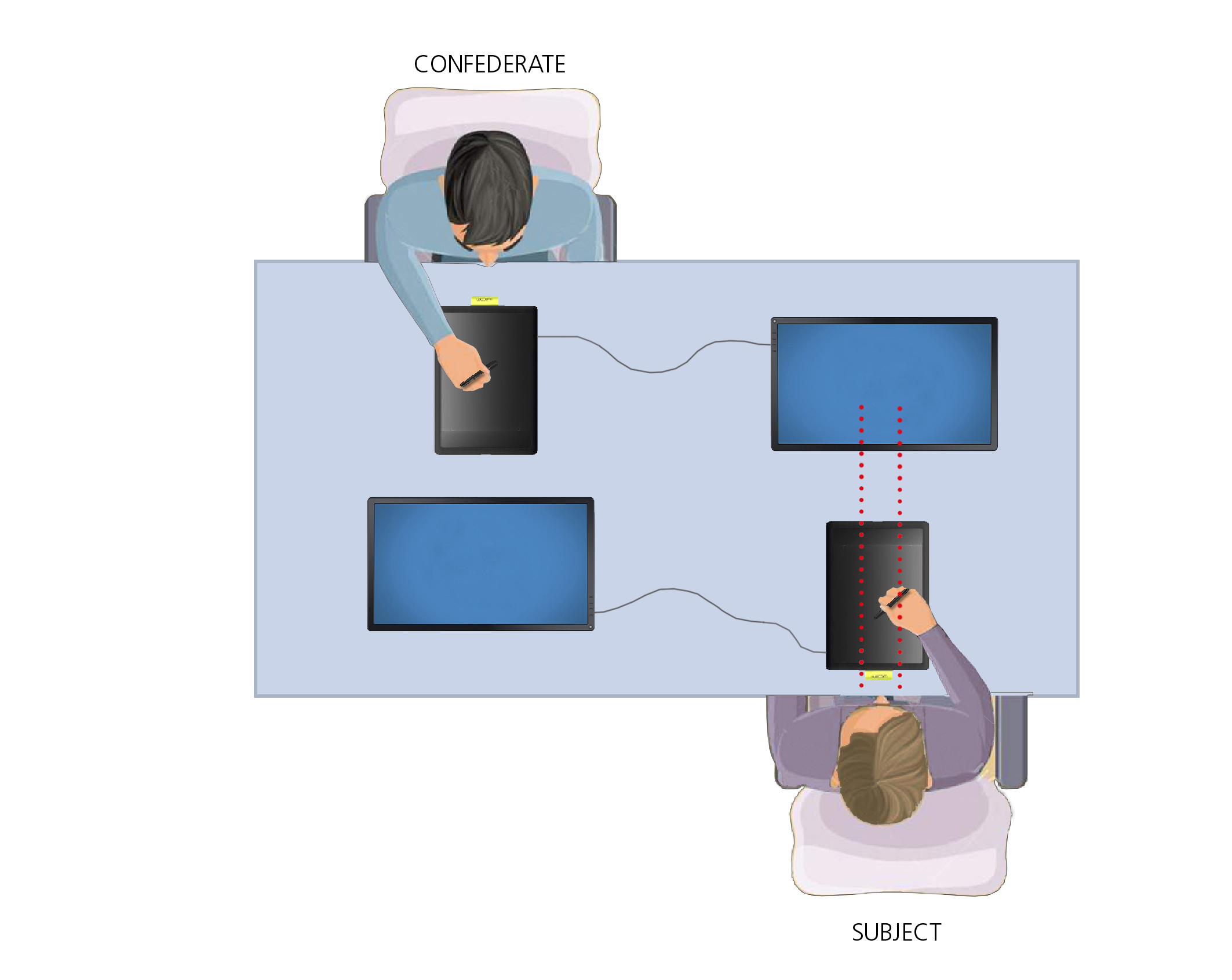
In the key conditions of our adapted version of the circle-line drawing paradigm,
participants were asked to unimanually draw circles with their right hands
while observing either lines being unimanually drawn by a confederate (Garbarini et al, 2013b;
Garbarini et al, 2016).
We contrasted a Parallel Action task with a Joint Action task.
These tasks differed only in the instructions given.
In the Joint Action task participants were instructed to perform the task
together with the confederate, as if their two drawing hands gave shape to a single design.
In the Parallel Action task, participants were given no such instruction so that
they could draw in parallel, observing each other but not acting together.
If participants were to follow our instructions, their actions would have
the collective goal of drawing a circle and a line in the Joint Action task but not in
the Parallel Task.
Our conjecture entails that this collective goal could be represented motorically.
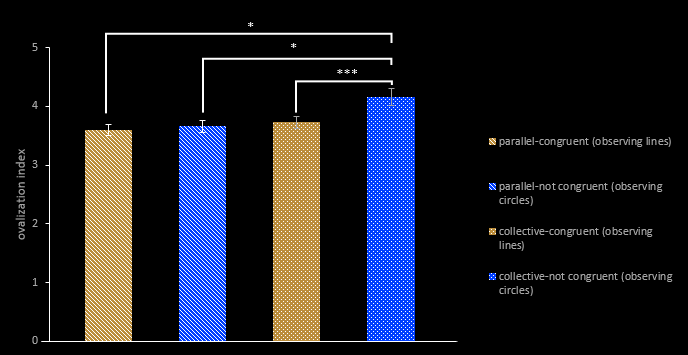
Accordingly, we predicted that there should be an interpersonal motor coupling effect.
This would result in greater ovalization of the lines drawn in the Joint Action task
than in the Parallel Action task ...
And that was actually what we found.
Our hypothesis is that interpersonal motor coupling may occur when an individual is acting unimanually, providing she is acting jointly with another and not merely acting in parallel. This is because in joint action, but not in parallel action, an individual could represent motorically the collective goal of drawing both a circle and a line even if she is actually only drawing a line. Somewhat as in the case of individual bimanual action, so also in joint action: the motor representations of one hand’s drawing can influence the motor representations of the other hand’s drawing. One difference in joint action, of course, is that the hands belong to different individuals.
della Gatta et al, ‘Drawn Together’ Cognition 2017